Jedediyah Williams

Hi! I teach high school Physics, Computer Science, and Robotics.
I like mathy science.
Education
Rensselaer Polytechnic Institute, Troy, NY
-
Ph.D. Computer Science, 2014
- Thesis: A contact model for geometrically accurate treatment of polytopes in simulation
- Advisor: Jeff Trinkle, Ph.D.
-
M.Ed. Curriculum and Teaching, 2018
- Capstone: An investigation of the conceptual-procedural gap in mathematics
- Director: Catherine Leahy Brine
-
B.S. Computer Systems Engineering, 2006
- Senior design project: Embedded wireless sensor networks for smart homes
Research
My Projects

Captain of Team Whalers, Finalists
Letter from State Representative Fernandes after the qualifying round
 Code
Code
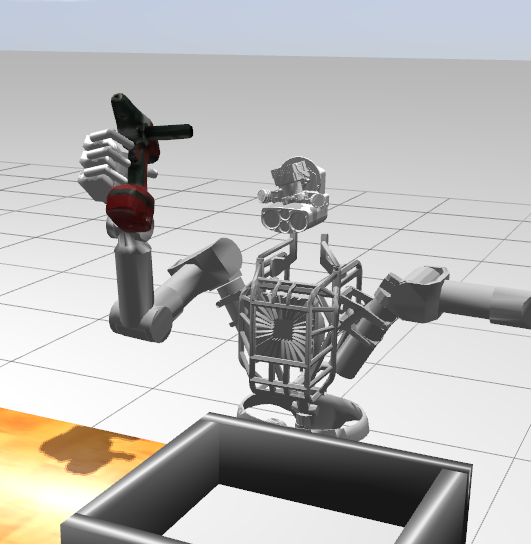
Member of Team TROOPER, Finalists
I ran experiments to characterize the behavior and grasping capabilities of the iRobot hand used on the ATLAS robot, and developed simulation models in Gazebo.
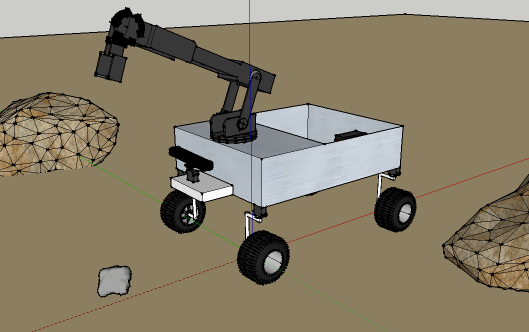
Member of RPI Rock Raiders
I worked on computer vision for near and far object recognition for identifying objects of interest and simultaneous localization and mapping (SLAM).

• Y. Lu, J. Williams, C. Lacoursiere, and J.C. Trinkle. A framework for problem standardization and algorithm comparison in multibody dynamics. ASME International Design & Engineering Technical Conferences and Computers & Information in Engineering (IDETC/CIE) 2014.
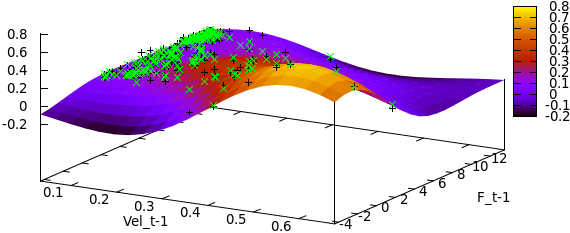
• J. Williams, B. Frank, W. Burgard, J.C. Trinkle. Stochastic characterization of traction on granular terrain. Technical Report 12-06, Department of Computer Science, Rensselaer Polytechnic Institute. December, 2012.
Teaching
-
Belmont High School
- Physics & Computer Science Teacher, August 2023 - present
-
Courses taught at Belmont High School
- Introduction to Computer Science - 2024, 2025
- Introduction to Robotics - 2024
- Design and 3D Printing - 2025
- Honors Physics - 2024
- CP Physics - 2025
-
Advisorship
- 3D Printing Club - 2024, 2025
- Belmont Aerospace Student Society - 2025
- Nepali Club - 2024, 2025
-
Service
- Grading for Equity - 2025
-
Nantucket High School
- Mathematics Department Head, Aug. 2014 - June 2017
- Science Department Head, Aug. 2008 - June 2010
- Mathematics & Computer Science Teacher, Aug. 2014 - June 2023
- Physics & Astronomy Teacher, Aug. 2006 - June 2010
- AP Calculus AB Scorer, 2020 - 2023
-
Service
- Massachusetts Department of Elementary and Secondary Education, Teacher and Principal Advisory Cabinet - 2022, 2023
- Teacher Mentor / Committee - 2010, 2016, 2019, 2020, 2022, 2023
- District Mathematics Review Committee - 2015
- District Technology Committee - 2009, 2010, 2017
- Graduate Vision, Rubric Committee - 2019
- NEASC Steering Committee - 2019, 2022
- Scholarship Committee - 2015
- Teaching and Learning, Return to School Committee - 2020
- Wind Turbine Committee - 2010
- Science Fair Director - 2009, 2010, 2016, 2017
-
Advisorship
- Ballroom Dance Coach - 2007, 2008
- Chess Club - 2007, 2008, 2009, 2010, 2016
- Hip Hop Culture Organization - 2009
- Math League - 2020, 2021
- Philosophy Club - 2019
- Quidditch Club - 2009, 2010
- Students for Sustainability - 2010
- Technology/Robotics Club - 2015 to 2023
-
Grants Awarded
- STEM Mini-Grant, MIT Club of Cape Cod. $500, 2022.
- STEM Mini-Grant, MIT Club of Cape Cod. $500, 2021.
- Cape Cod 5 Educational Mini Grant, Cape Cod 5. $400, 2020.
- STEM Innovation Grant, MIT Club of Cape Cod. $300, 2019.
- MassDevelopment Commonwealth Advanced Manufacturing Futures Program. $500, 2017.
- Blue Hills Bank. $5000, 2015.
- Blue Hills Bank. $10000 split between Mathematics and Science Departments, 2014.
-
Courses Taught at Nantucket High School
- Advanced Quantitative Reasoning - 2016, 2023
- Algebra 1 - 2010, 2021, 2022, 2023
- Algebra 2 - 2015, 2017
-
AP Calculus AB - 2016 to 2023
- Broke school records for most 5s or highest average score in 2017, 2018, 2019
- Broke school record for most passing scores (17) in 2020
- AP Calculus BC - 2020, 2023
- Offered as an after school elective to AB students. 100% Pass Rate
-
AP Computer Science Principles - 2018
- Received the AP Computer Science Female Diversity Award
- 31% of my students scored a 5, compared to 13.5% globally
- Astronomy - 2007, 2008, 2009
- Computer Science 1 - 2010, 2019
- Honors Computer Science 1 - 2021, 2022
- Digital Electronics - 2015
- Essentials of Physical Science - 2010
- Exhibition (independent study) - 2007, 2008, 2009, 2016, 2017, 2023
- Global Science - 2007, 2008, 2009
- Java Programming - 2015
- Physics - 2007, 2008, 2009, 2010
- Honors Physics - 2007 to 2010, 2020
- Honors Precalculus - 2015 to 2020, 2023
- School to Career - 2017, 2020, 2022
-
Rensselaer Polytechnic Institute
- NSF Graduate STEM Fellow in K-12 Education, Aug. 2011 - July 2012
- Teaching Assistant, Spring 2011
- Teaching Assistant, Fall 2010
Publications
Journal Publications
- J. Williams. Building a Digit Classifier with MNIST. Mathematics Teacher: Learning and Teaching PK-12, 117(2), 129-137, 2024. https://doi.org/10.5951/MTLT.2023.0187
- J. Williams, Y. Lu, and J. C. Trinkle. A geometrically exact contact model for polytopes in multirigid-body simulation. J. Comput. Nonlinear Dynam., 12(2), 2016. doi:10.1115/1.4034390
- D. M. Flickinger, J. Williams, and J. C. Trinkle. Performance of a method for formulating geometrically exact complementarity constraints in multibody dynamic simulation. J. Comput. Nonlinear Dynam., 10(1), 2014. doi:10.1115/1.4027314
- M. Bedell, A. Villaume, L. Weiss, D. Sliski1, V. Strelnitski, G. Walker, J. Williams, A. Henden, and T. Krajci. Monitoring Hα emission and continuum of UXORs: RR Tauri. The Astronomical J., 142(5), November 2011. doi: 10.1088/0004-6256/142/5/164
-
J. Williams, Y. Lu, and J. C. Trinkle. A complementarity based contact model for geometrically accurate treatment of polytopes in simulation. In
10th International Conference on Multibody Systems, Nonlinear Dynamics, and
Control, volume 6, Buffalo, NY, 2014. ASME. doi:10.1115/DETC2014-35231
- Y. Lu, J. Williams, J. C. Trinkle, and C. Lacoursire. A framework for problem standardization and algorithm comparison in multibody system. In 10th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, volume 6, Buffalo, NY, 2014. ASME. doi:10.1115/DETC2014-35041
- Y. Lu, J. Williams, C. Lacoursire, and J. C. Trinkle. Standard interface for data analysis of solvers in multibody dynamics. In 4th Canadian Conference on Nonlinear Solid Mechanics (CanCNSM), Montreal, QC, Canada, 2013
- J. Williams, Y. Lu, S. Niebe, M. Andersen, K. Erleben, and J. C. Trinkle. RPI-MATLAB-Simulator: A Tool for Efficient Research and Practical Teaching in Multibody Dynamics. In J. Bender, J. Dequidt, C. Duriez, and G. Zachmann, editors, Workshop on Virtual Reality Interaction and Physical Simulation. The Eurographics Association, 2013. doi:10.2312/PE.vriphys.vriphys13.071-080
- D. M. Flickinger, J. Williams, and J. C. Trinkle. Evaluating the performance of constraint formulations for multibody dynamics simulation. In 9th International Conference on Multibody Systems, Nonlinear Dynamics, and Control, volume 7A, Portland, OR, 2013. ASME. doi: 10.1115/DETC2014-35231
- D. M. Flickinger, J. Williams, and J. C. Trinkle. What’s wrong with collision detection in multibody dynamics simulation? In Robotics and Automation (ICRA), Karlsruhe, Germany, October 2013. doi:10.1109/ICRA.2013.6630689
- J. Williams, Y. Lu, and J. Trinkle. RPI-MATLAB-Simulator User Guide. Rensselaer Polytechnic Institute, November 2013
- J. Williams, B. Frank, W. Burgard, and J. C. Trinkle. Stochastic characterization of traction on granular terrain. Technical Report 12-06, Department of Computer Science, Rensselaer Polytechnic Institute, December 2012
- J. Williams. AI as a Technical Skill Set Instead of a Consumer Skill Set. CSTA New England 2024. November, 2024. URL https://jedediyah.github.io/csta2024/
- J. Williams. Hands-on Machine Learning. Massachusetts Teacher STEM Fair. Gillette Stadium, Foxborough, MA. October, 2024.
- J. Williams. Numerical Computing with Data. NCTM Annual Meeting and Exposition, Chicago, IL. September 2024. URL https://jedediyah.github.io/nctm2024/
- J. Williams. Sensitive Dependence on Initial Conditions, How AI Predictably Fails Unpredictably. AAPT Summer Conference. Boston, MA. July 8, 2024. URL https://jedediyah.github.io/aapt2024/
- J. Williams. The Mathematics of Robotics. NCTM Virtual Conference. April 2024. URL https://jedediyah.github.io/nctm2024virtual/
- J. Williams. AI is not what you think it is, unless you think it is hot garbage. ATMIM Spring Conference: All Students Deserve a Piece of Pi, Worcester, MA. March 14, 2024. URL https://jedediyah.github.io/atmim2024/
- J. Williams. Beauty, Utility, and Consequence in Mathematics. NCTM Annual Meeting and Exposition, Washington D.C. October 2023. URL https://jedediyah.github.io/nctm2023/
- J. Williams. Packing and scheduling in 2d and 3d. Massachusetts Teacher STEM Fair. Gillette Stadium, Foxborough, MA. September 2023.
- J. Williams. The Ethics of a STEM Education in the Age of AI. Science Speaker Series, Maria Mitchell Association. April, 2023. Slides: https://jedediyah.github.io/mma2023/ Video: https://www.youtube.com/watch?v=P94cgwpUhHM
- The Nature of Nantucket Podcast. Maria Mitchell Association.
- J. Williams. Collaborative Data Science. NCTM Virtual Conference. March 2023. URL https://jedediyah.github.io/nctm2023virtual/
- J. Williams. Hard algorithms: Packing and scheduling in 2d and 3d. Massachusetts Teacher STEM Fair. Christa McAuliffe Center. October 2022.
- J. Williams. Breaking Bias in Data and Modeling. NCTM Annual Meeting and Exposition, LA, CA. September, 2022. URL https://jedediyah.github.io/nctm2022/
- J. Williams. Data science and consequences in mathematical modeling. NCTM Fall Virtual Conference. November 2021. URL https://jedediyah.github.io/nctm2021/
- J. Williams. Data science and consequences in mathematical modeling. NCTM Centennial Annual Meeting and Exposition, Atlanta, GA. September 2021 (conference canceled).
- J. Williams. Feedback En Passant. Massachusetts Department of Elementary and Secondary Education Share-A-Thon: Feedback Strategies. November 2020.
- J. Williams. Machine learning and the future of mathematical modeling. NCTM Centennial Annual Meeting and Exposition, Chicago, IL, April 2020 (conference canceled).
- J. Williams. Robotics and education. Science Speaker Series, Maria Mitchell Association, September 2016
- J. Williams, Y. Lu, and J. C. Trinkle. A complementarity based contact model for physically accurate treatment of polytopes in simulation. BIRS Workshop on Computational Contact Mechanics: Advances and Frontiers in Modeling Contact, February 2014. URL http://www.birs.ca/events/2014/5-day-workshops/14w5147/videos/
- Y. Lu, J. Williams, and J. C. Trinkle. A framework for problem standardization and algorithm comparison in multibody dynamics. BIRS Workshop on Computational Contact Mechanics: Advances and Frontiers in Modeling Contact, February 2014. URL http://www.birs.ca/events/2014/5-day-workshops/14w5147/videos/
- J. Williams and J. C. Trinkle. Determining contact and contact response between moving geometries in simulation. In 10th annual New England Manipulation Symposium (NEMS), Columbia University, New York, NY, May 2013
- J. Williams, J. Dong, D. M. Flickinger, and J. C. Trinkle. Team TROOPER in the DARPA Robotics Challenge (DRC). Rensselaer Polytechnic Institute CS Poster Session, April 2014
- J. Williams and J. C. Trinkle. A stable and geometrically accurate contact model. Rensselaer Polytechnic Institute CS Poster Session, April 2014
- Y. Lu, J. Williams, and J. C. Trinkle. Team TROOPER in the DARPA Robotics Challenge (DRC). Rensselaer Polytechnic Institute CS Poster Session, April 2014
- Y. Lu, J. Williams, C. Lacoursiere, and J. C. Trinkle. Standard interface for solver comparison in multibody dynamics. In 9th annual New England Manipulation Symposium (NEMS), Harvard University, Cambridge, MA, May 2013
- J. Williams, Y. Lu, and J. C. Trinkle. Improving multibody dynamics. Rensselaer Polytechnic Institute CS Poster Session, March 2013
- D. M. Flickinger, J. Williams, and J. C. Trinkle. Evaluating the performance of constraint formulations for multibody dynamics simulation. Portland, Oregon, 2013. ASME International Design Engineering Technical Conferences (IDETC), 9th International Conference on Multibody Systems, Nonlinear Dynamics, and Control (MSNDC)
- D. M. Flickinger, J. Williams, and J. C. Trinkle. Simulation accuracy and computational performance of a rotating slender rod impacting a bed of rocks. Montreal, QB, Canada, 2013. 4th Canadian Conference on Nonlinear Solid Mechanics (CanCNSM)
- J. Williams and J. C. Trinkle. Stochastic characterization of traction on granular terrain. DARPA Maximum Mobility and Manipulation (M3) annual PI meeting, July 2012
- S. Marshall, J. Williams, T. Mazeh, G. Walker, and V. Strelnitski. Using SysRem as an Alternative Photometry Technique. In C. Sterken, N. Samus, and L. Szabados, editors, Variable Stars, the Galactic halo and Galaxy Formation, February 2010. URL http://adsabs.harvard.edu/abs/2010vsgh. conf..221M
- J. Williams, M. Davidson, V. Strelnitski, and G. Walker. Improving the Precision of Differential Photometry on a Determined Target Using SysRem. In American Astronomical Society Meeting Abstracts #213, volume 41 of Bulletin of the American Astronomical Society, page 193, Jan. 2009. URL http://adsabs.harvard.edu/abs/2009AAS... 21340214W
- J. Williams, G. Walker, and V. Strelnitski. Observations of exoplanets at Maria Mitchell Observatory. 97th meeting of the American Association of Variable Star Observers (AAVSO), October 2008
Honors
Exemplary service to the students of Massachusetts, 2022
As a member of the Principal and Teacher Advisory Cabinet. Recognition from MA Department of Secondary and Elementary Education.
Semifinalist, 2023 Massachusetts Teacher of the Year, 2022
MA Department of Secondary and Elementary Education
NASA Space Robotics Challenge Phase 2 Top 5 Winner Overall, 2021
Captain, Team Whalers
NASA Space Robotics Challenge Phase 2 Qualification Winner and Finalist, 2021
Captain, Team Whalers
Presidential Awards for Excellence in Mathematics and Science Teaching, 2020
2019 Massachusetts Awardee in Mathematics
State Finalist for Presidential Awards for Excellence in Mathematics and Science Teaching, 2019
Massachusetts Finalist in Mathematics
AP Computer Science Female Diversity Award, 2018
Awarded by the College Board
NASA Space Robotics Challenge Qualification Winner and Finalist, 2017
Captain, Team Whalers
DARPA Robotics Challenge, 2014
Member of Team TROOPER, Finalists
McKinney Poetry Contest Winner, 2014
First Prize awarded for "Cindy"
NSF GK-12 Teaching Fellowship, 2011
Awarded through RPI's Triple Helix Project, directed by Prof. Ron Eglash
Valuable contribution to Nantucket Public Schools, 2010
Awarded by Nantucket School Committee
Valuable contribution to Nantucket Public Schools, 2009
Awarded by Nantucket School Committee
Microcontroller Master, 2005
This playful title was granted annually to a UMass Amherst computer engineering major for the best (most efficient) PIC implementation of a challenge algorithm. My winning strategy was to simply double the memory space required,
which saved a clock cycle with each swap of values in an array.